Research Interests
My research deals with mathematical control theory and optimization, and various applications in the fields of robophysics and biofluid mechanics, especially micro-swimming -- the motion of micro-organisms and micro-robots in a fluid.
Controllability, systems control
I am interested in control of nonlinear systems. In particular, I have worked on local controllability conditions for nonlinear control-affine systems in finite dimension, which usually involves to look at underlying Lie algebra structures. For both finite and infinite dimensional systems, I also take interest in the state-constrained controllability and sliding mode control.
Micro-swimming and control theory
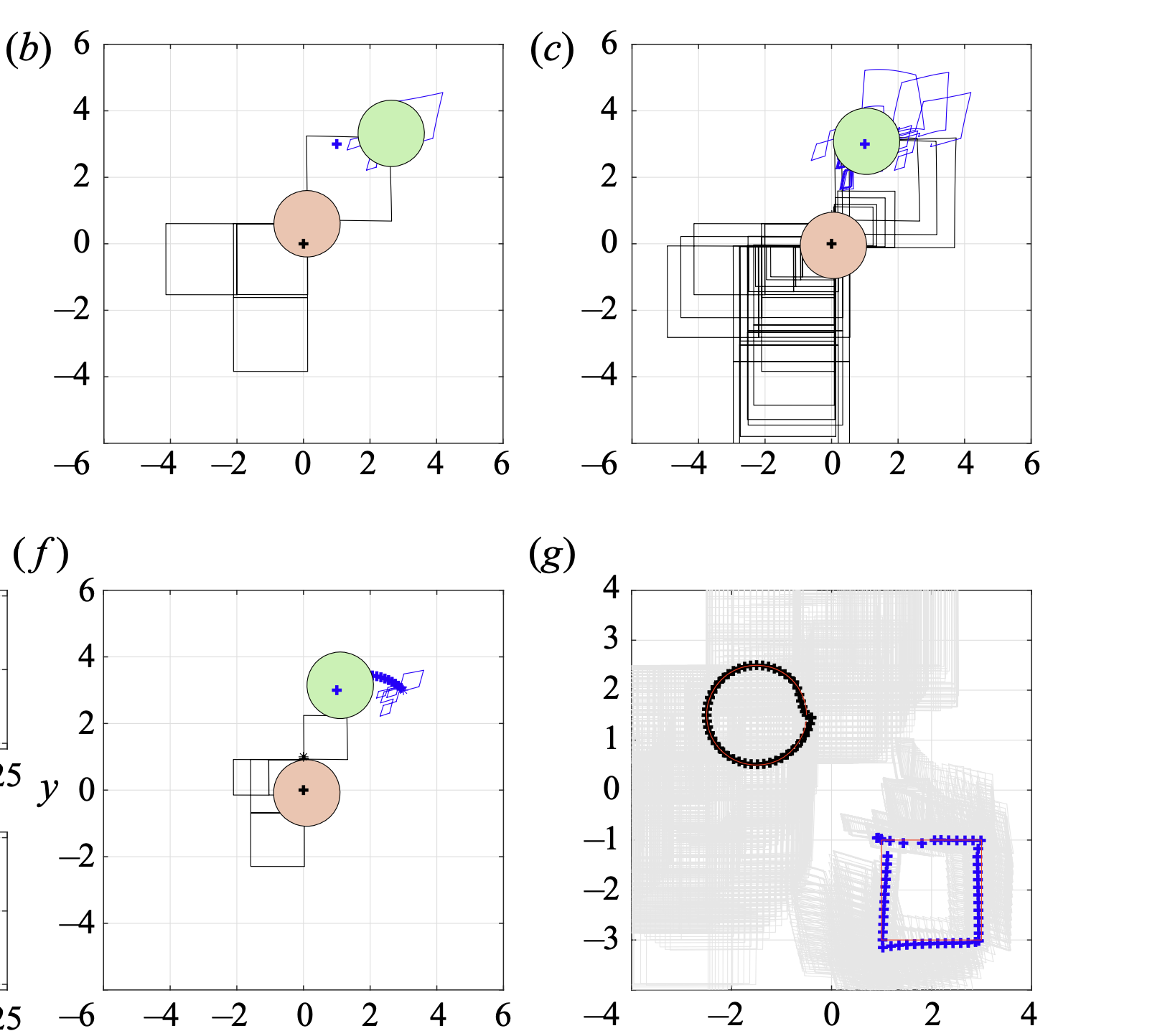
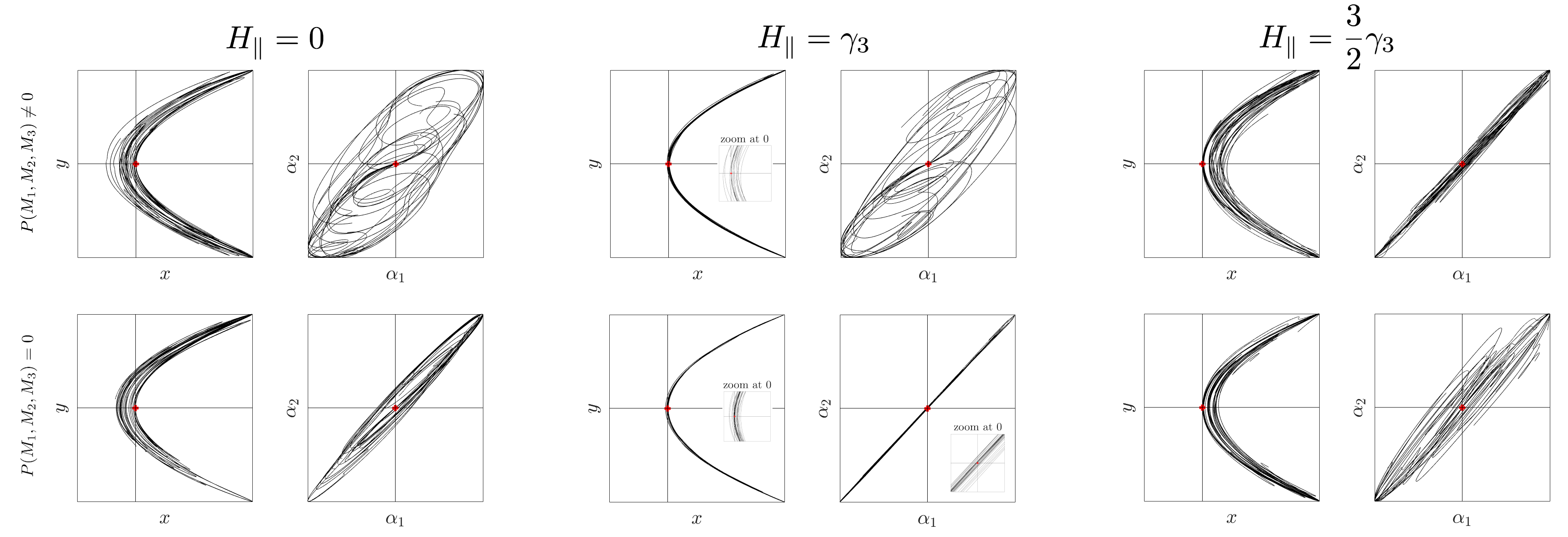
I study the motion of swimming micro-organisms through modelling, controllability analysis and numerical simulations. I use the tools of control theory on various models to better understand, predict or influence related phenomena. In particular, I have worked on models of magnetically controlled elastic robots, and on control of particles with external fluid interactions.
Bio-inspired robotic locomotion of slender bodies
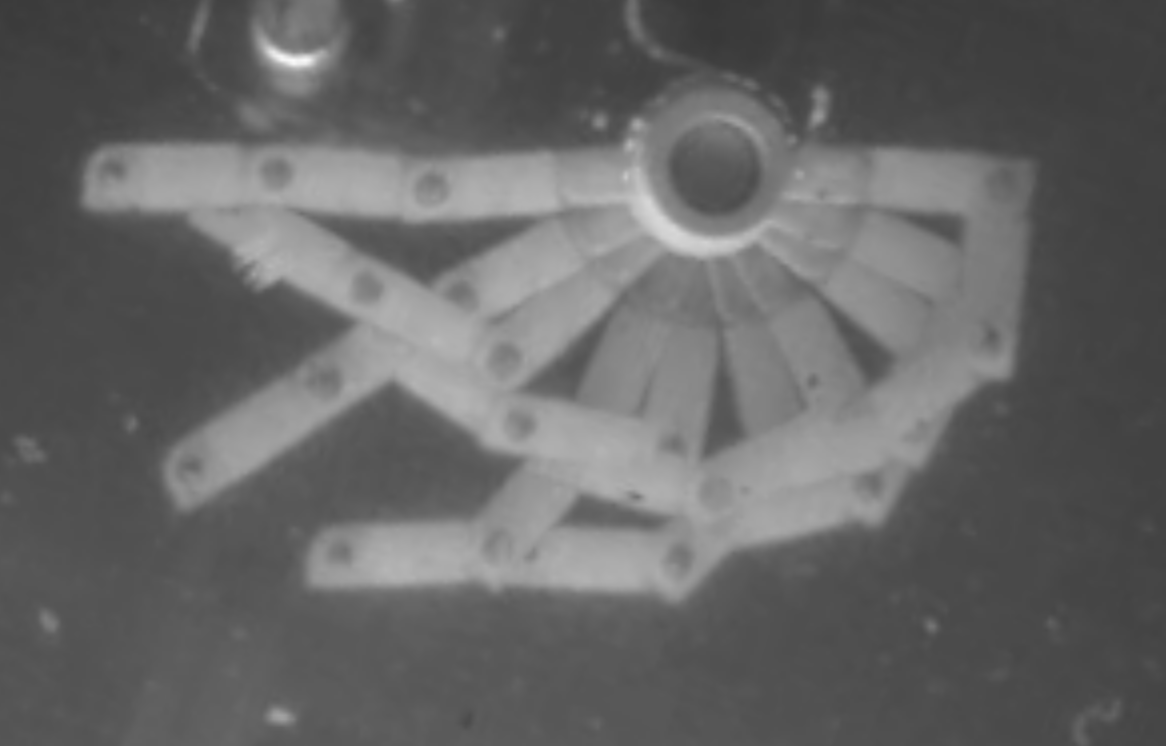
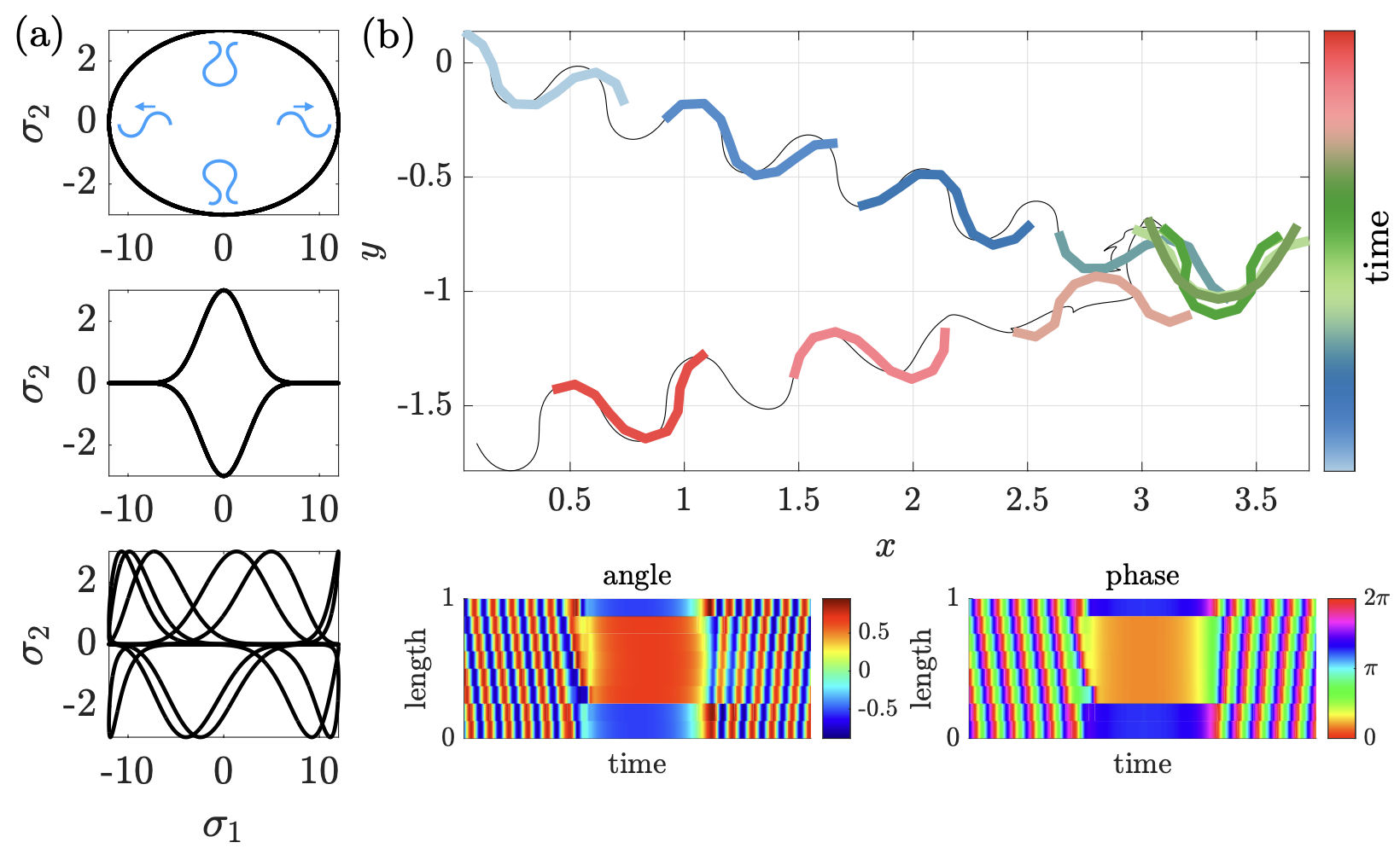
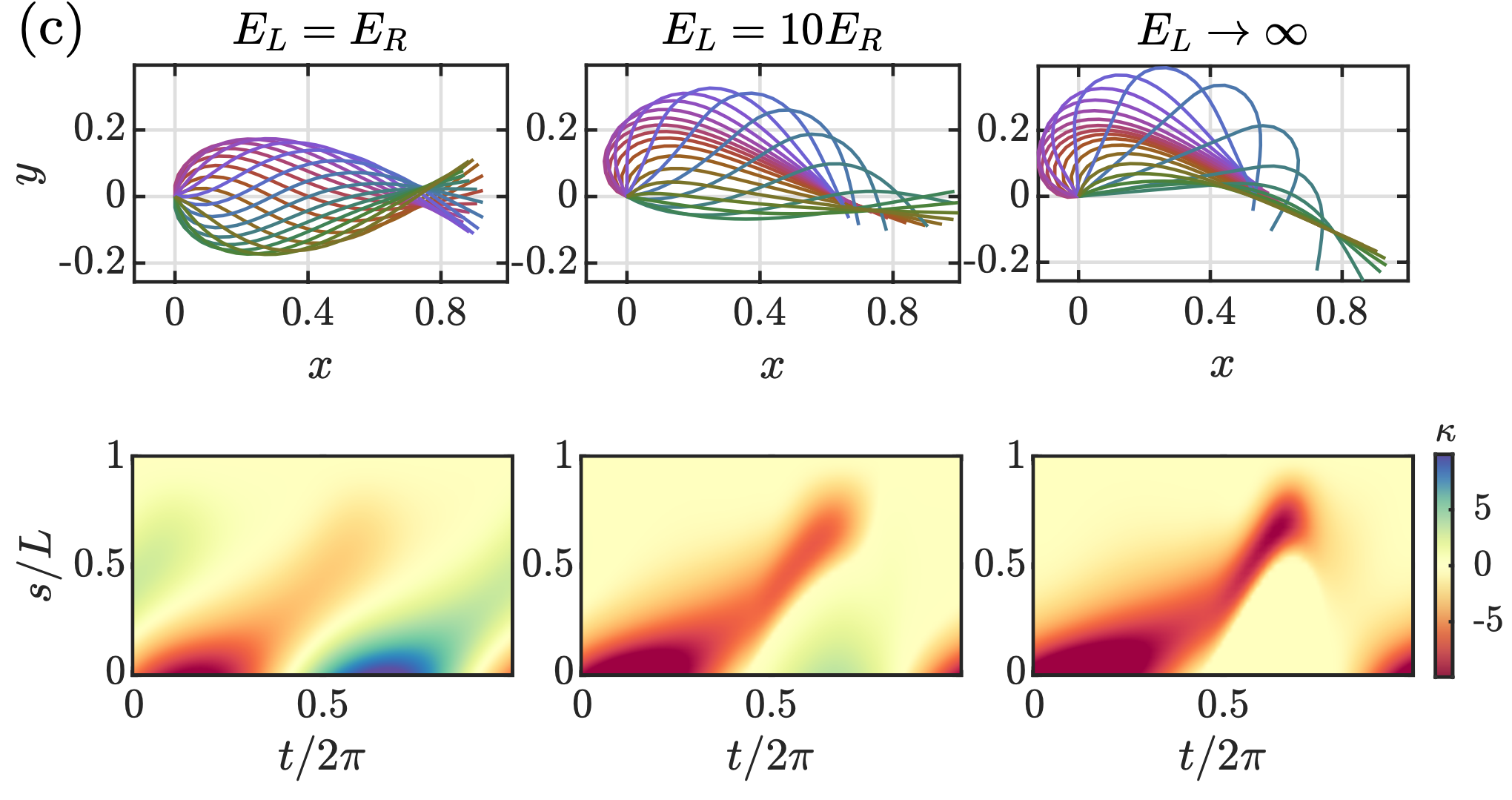
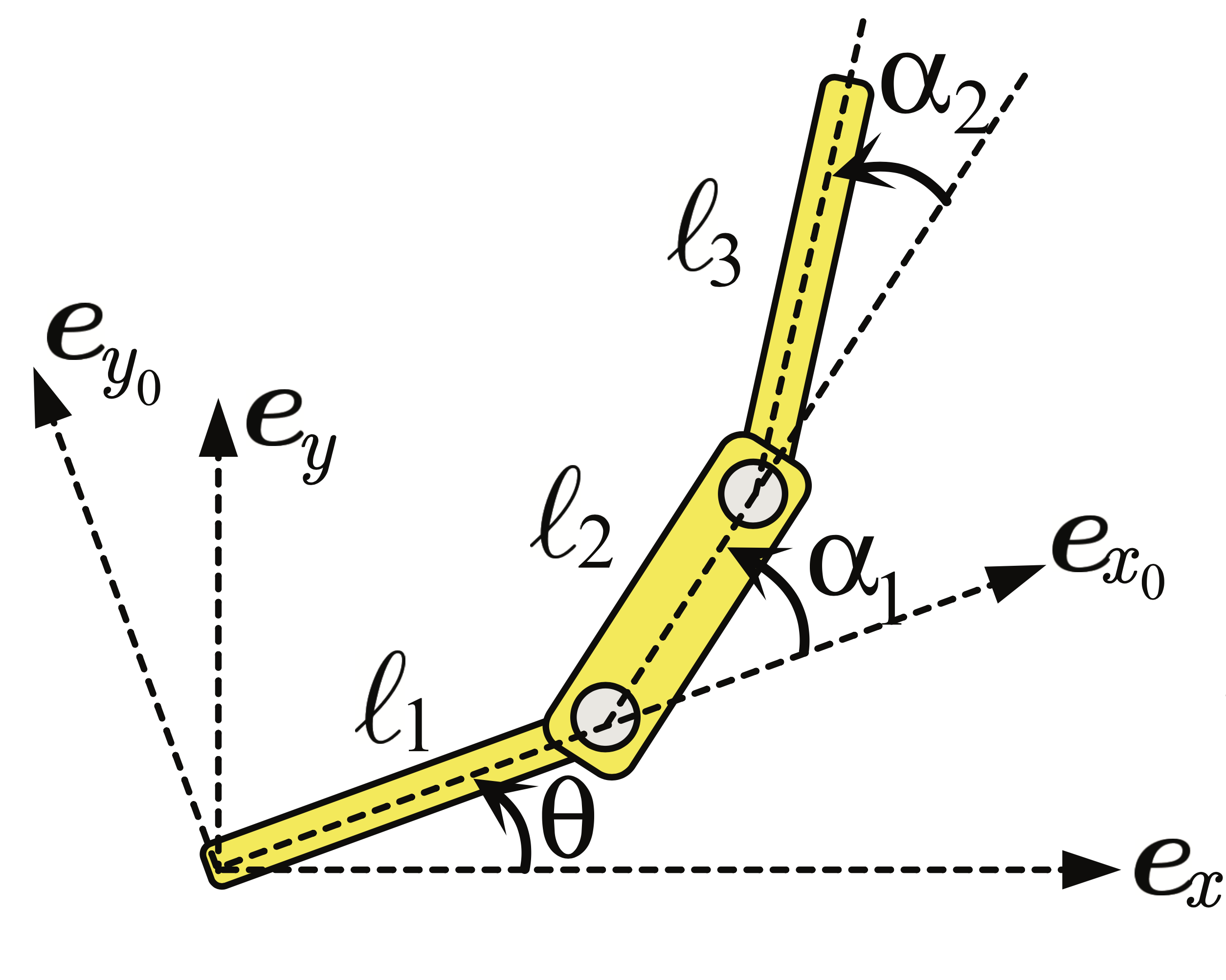
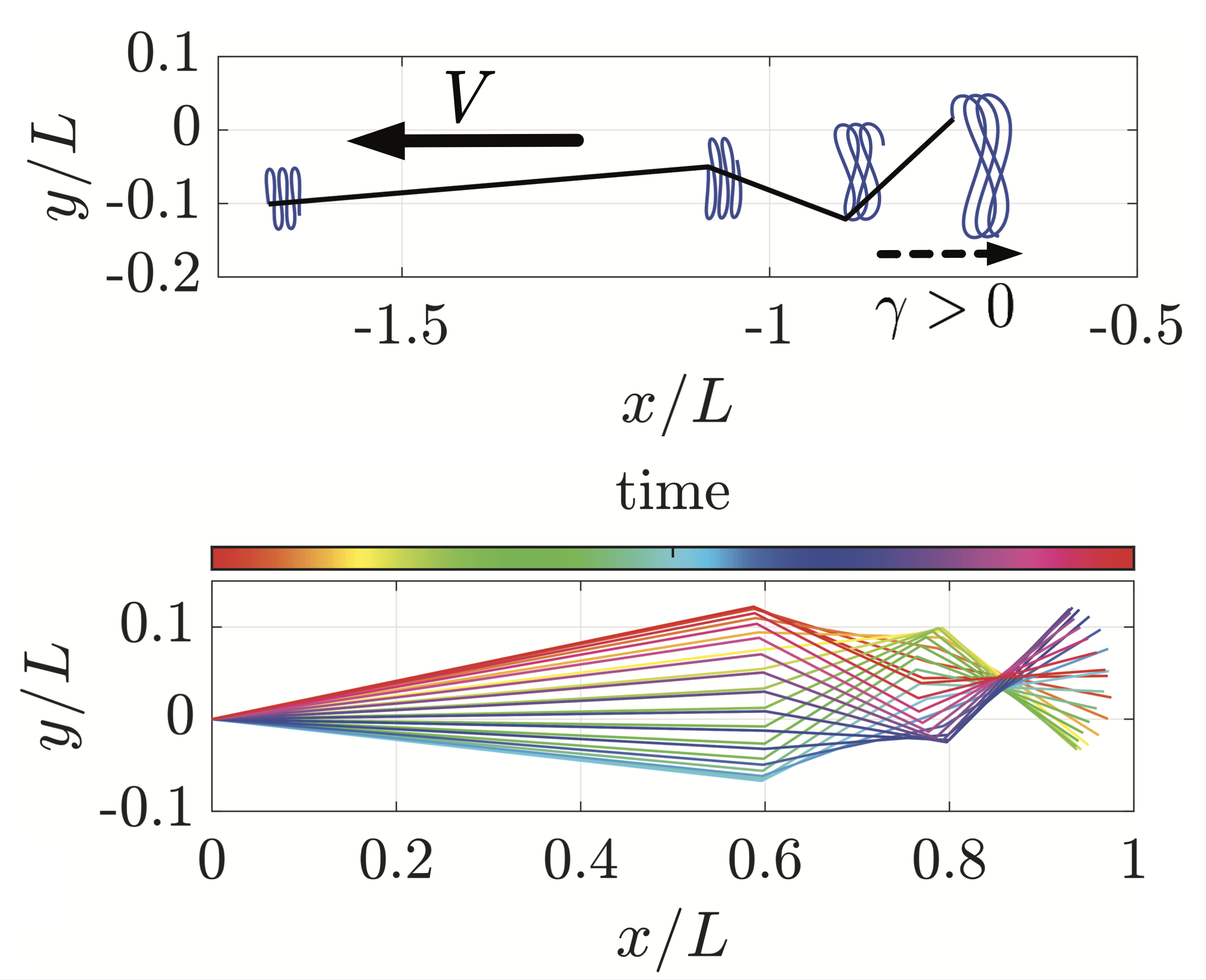
I develop models and numerical simulations to study the motion and dynamics of slender, flexible continuous structures in complex media (fluids, non-Newtonian fluids, granular media). One of my goals is to cast this class of complex dynamics as (infinite-dimensional) control systems.
Modelling and optimisation for fluid dynamics
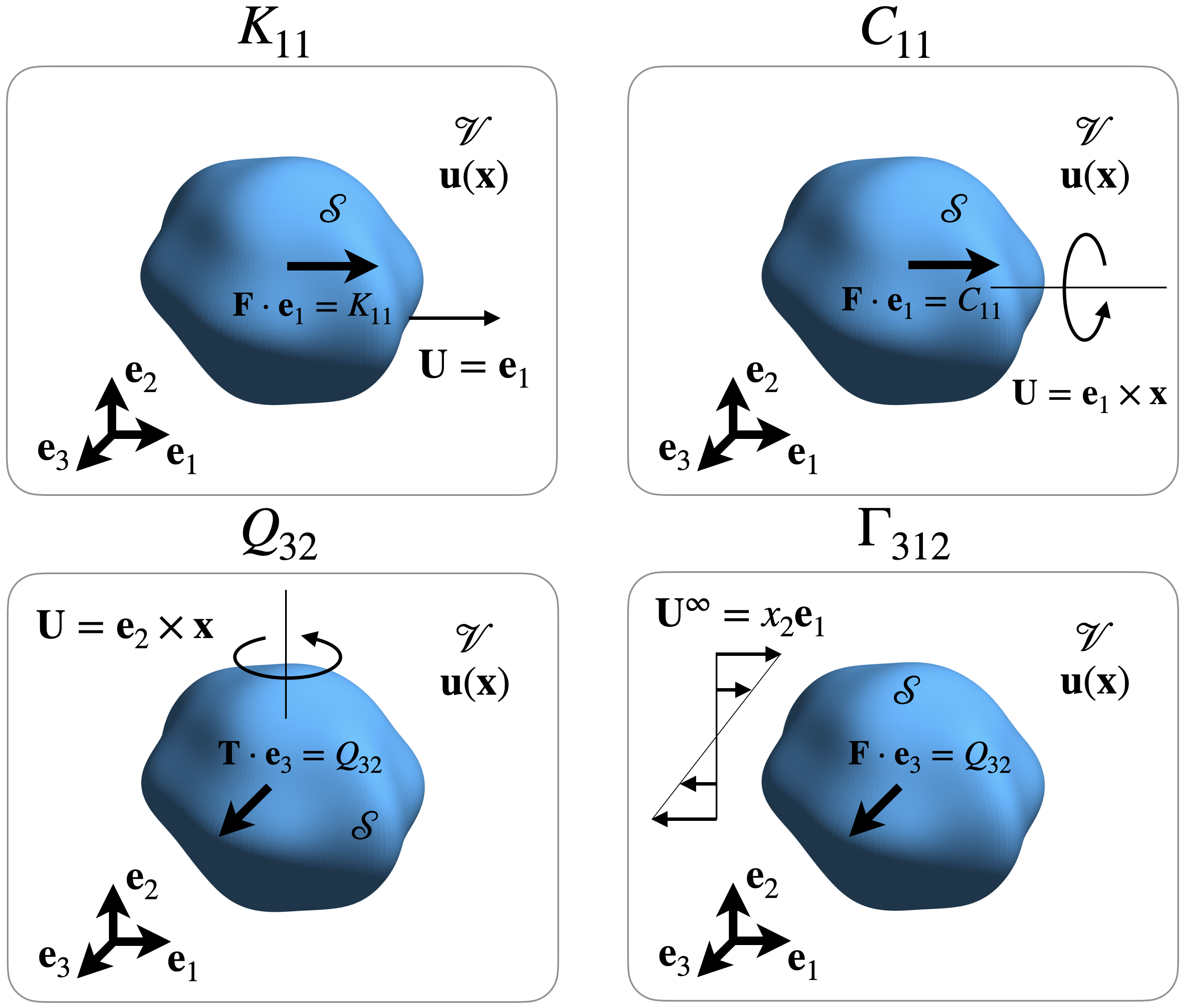
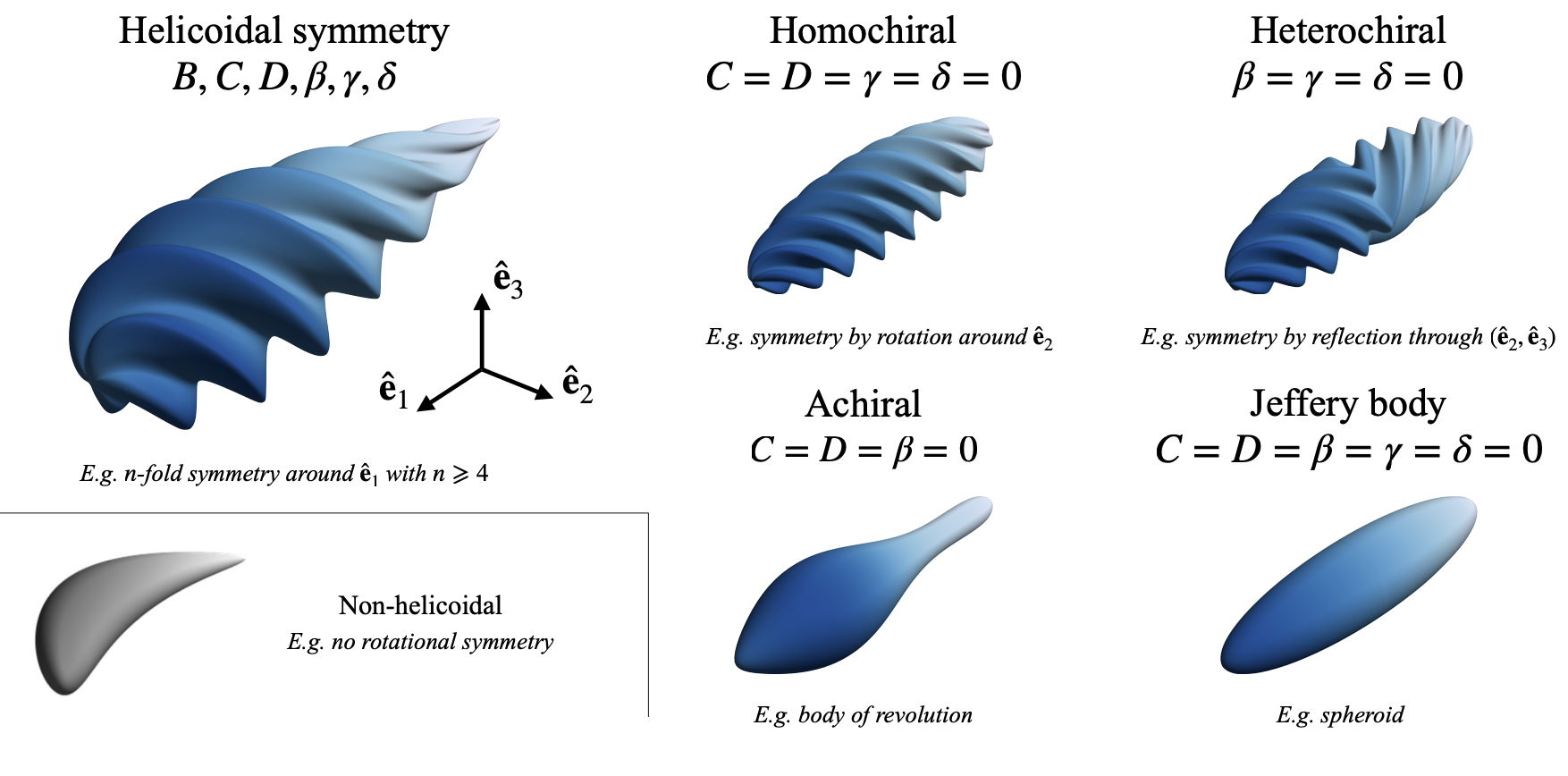
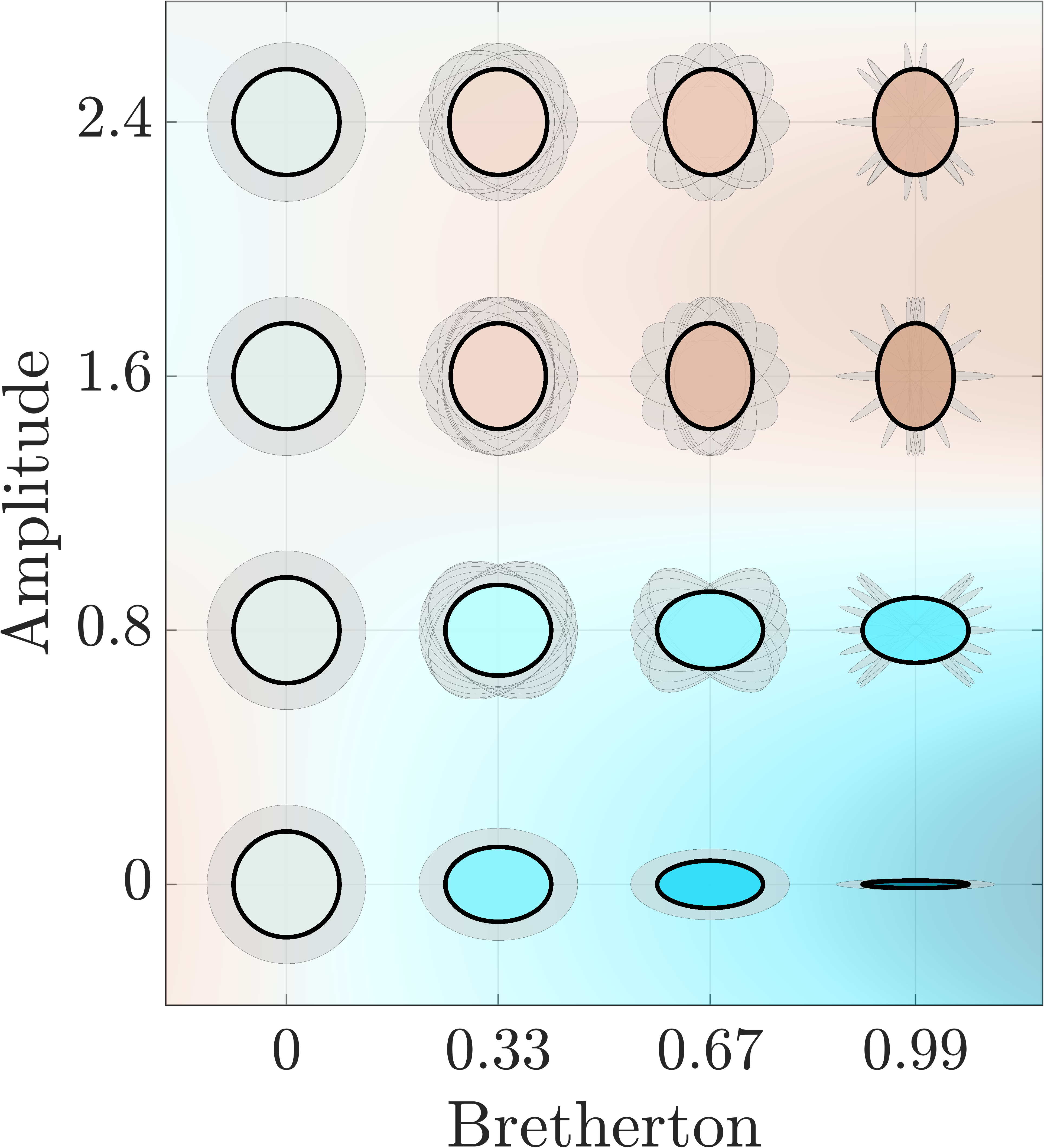
I am broadly interested in fluid mechanics at low Reynolds number and fluid-structure interactions. I use various mathematical tools such as functional analysis, shape optimisation and multiscale analysis to investigate questions related to fluid dynamics, mostly at Stokes regime, with applications to micro-swimming, biofluids and robotics.